Pix4Dmapper正射影像拼接和倾斜三维建模教程
作者:GIS前沿 2019-05-31 来源:GIS前沿
今天主要介绍Pix4Dmapper软件的常见功能,包括正射影像拼接和倾斜三维建模。

Pix4Dmapper是瑞士Pix4D公司的全自动快速无人机数据处理软件,是目前市场上独一无二的集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件。无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、精确的二维地图和三维模型,该软件可从航拍片中利用摄影测量与多目重建的原理快速获取点云数据,并进行后期的加工处理。加工处理后的应用,可惠及不同行业,例如测绘、文物保护、矿业等等。应用领域包括航测制图、灾害应急、安全执法、农林监测、水利防汛、电力巡线、海洋环境、高校科研、军事等多个领域。
一、新建工程
打开Pix4Dmapper软件。

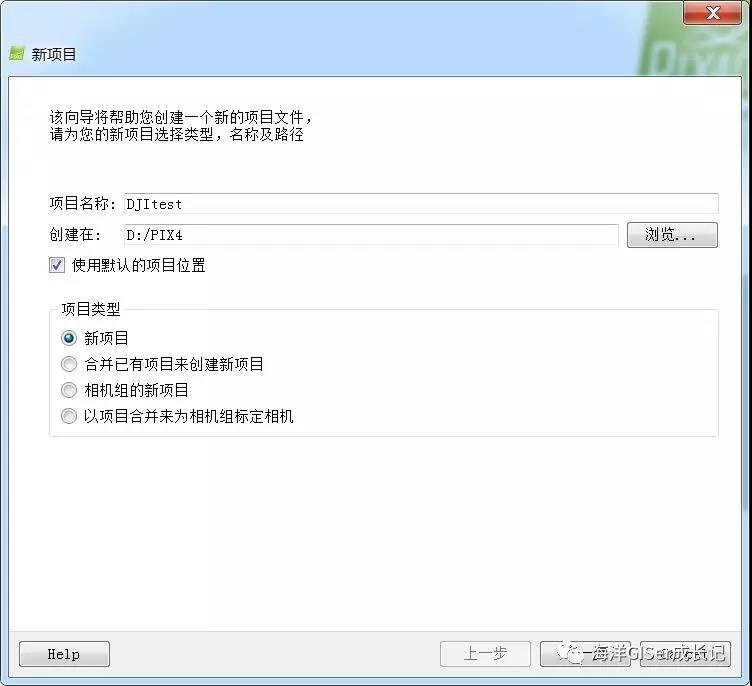
单击“项目”-“新项目”子菜单,填写项目名称,存储路径等信息。
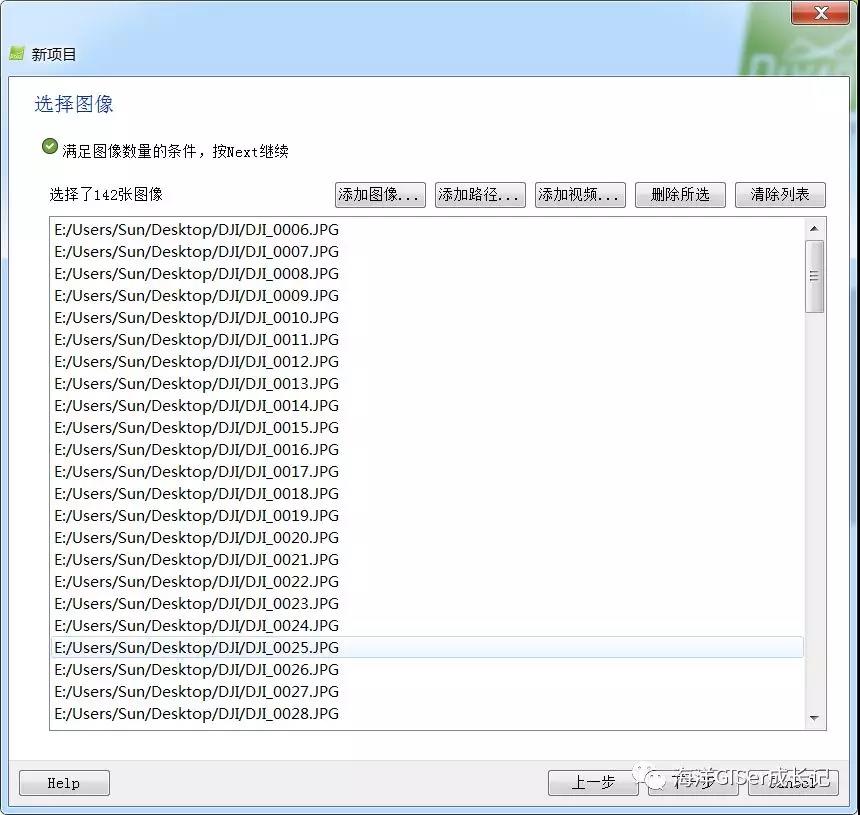
导入大疆无人机获取的照片。
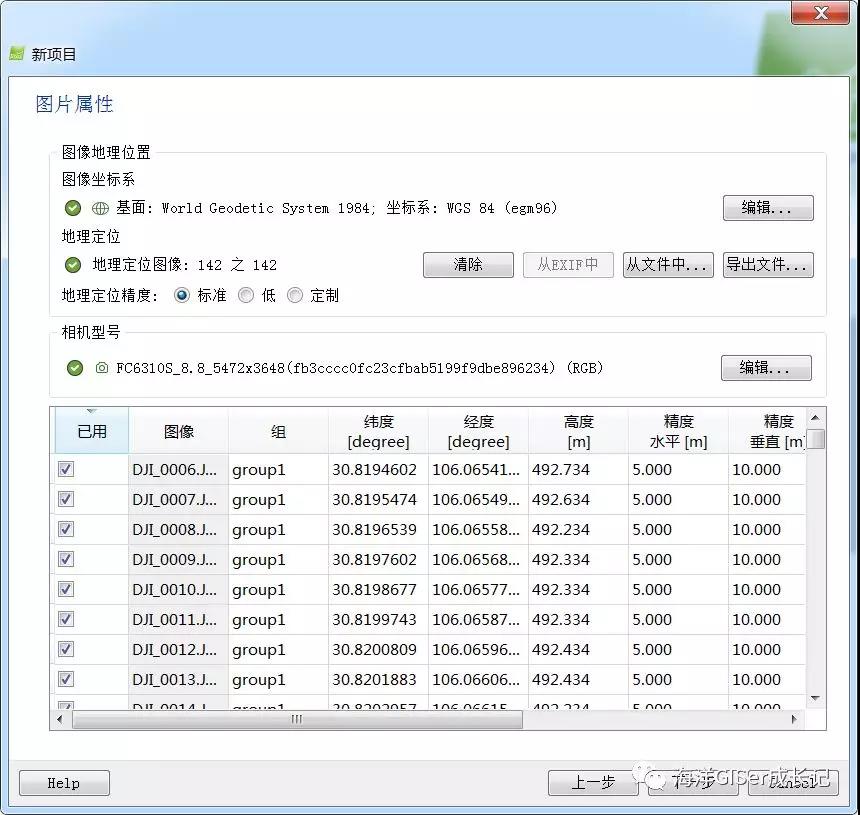
软件自动读取照片位置信息。
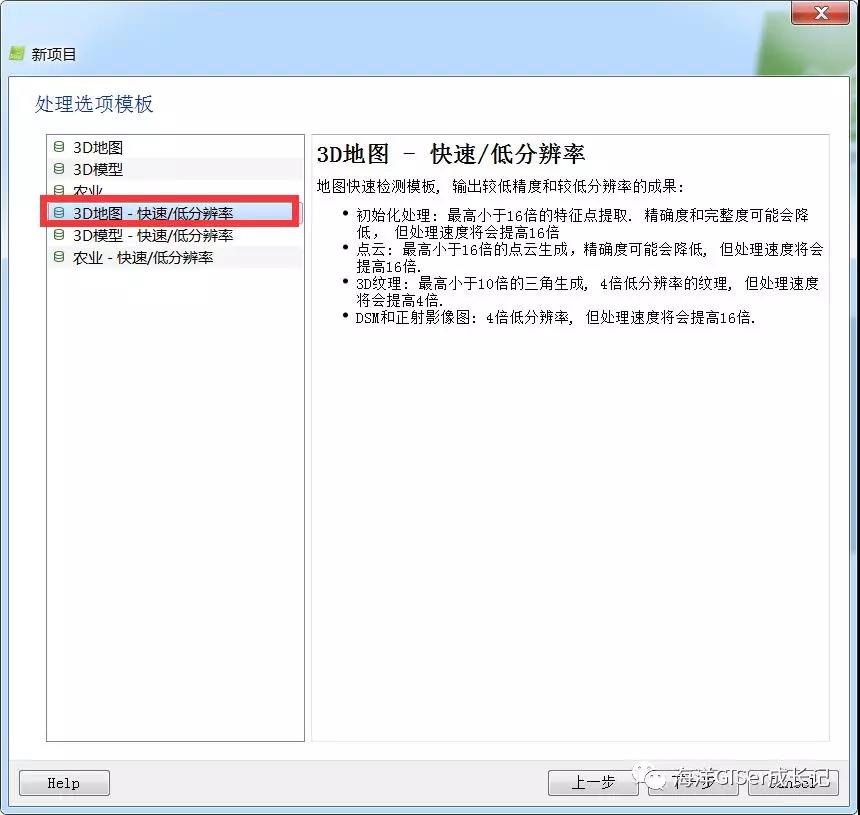
选择3D地图模板为正射影像拼接,选择3D模型模板为倾斜三维建模。
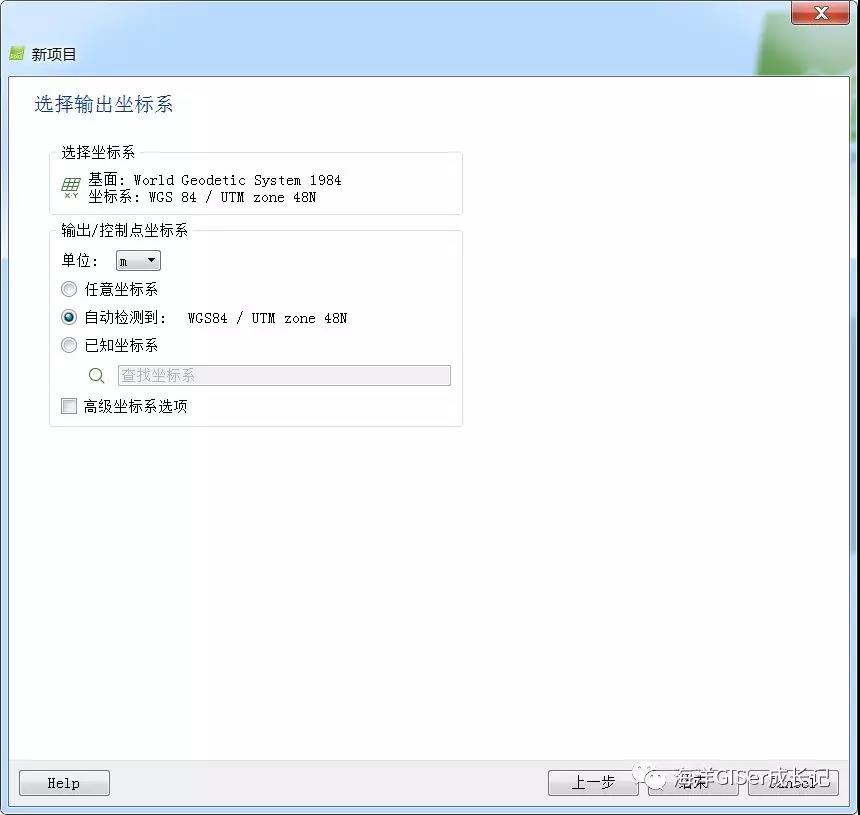
设置坐标系和投影,默认为WGS84坐标系,UTM投影,通常不需要修改。
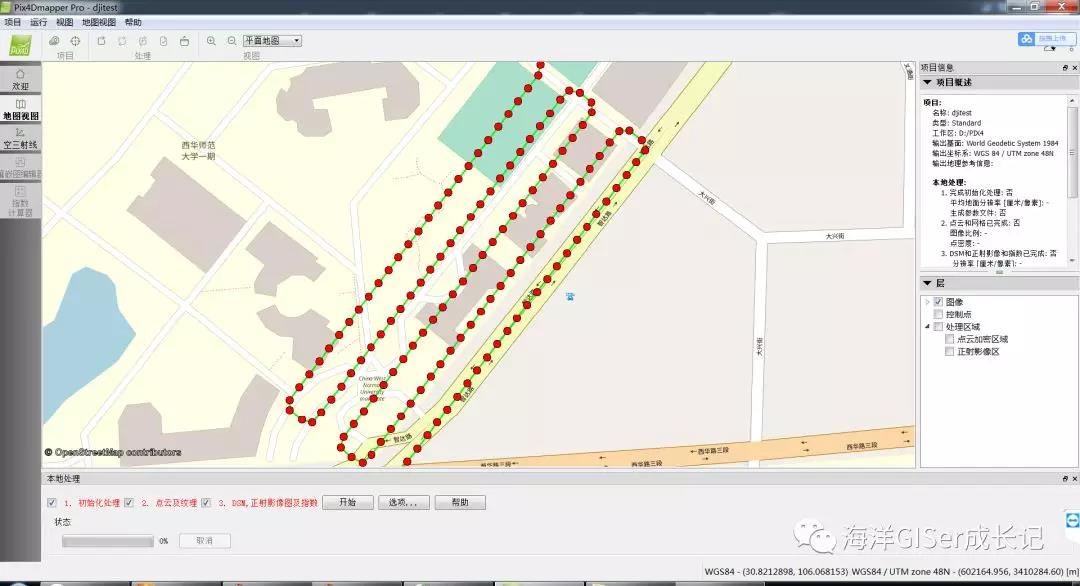
坐标系设置完成后,无人机照片根据拍摄位置展点到地图上。
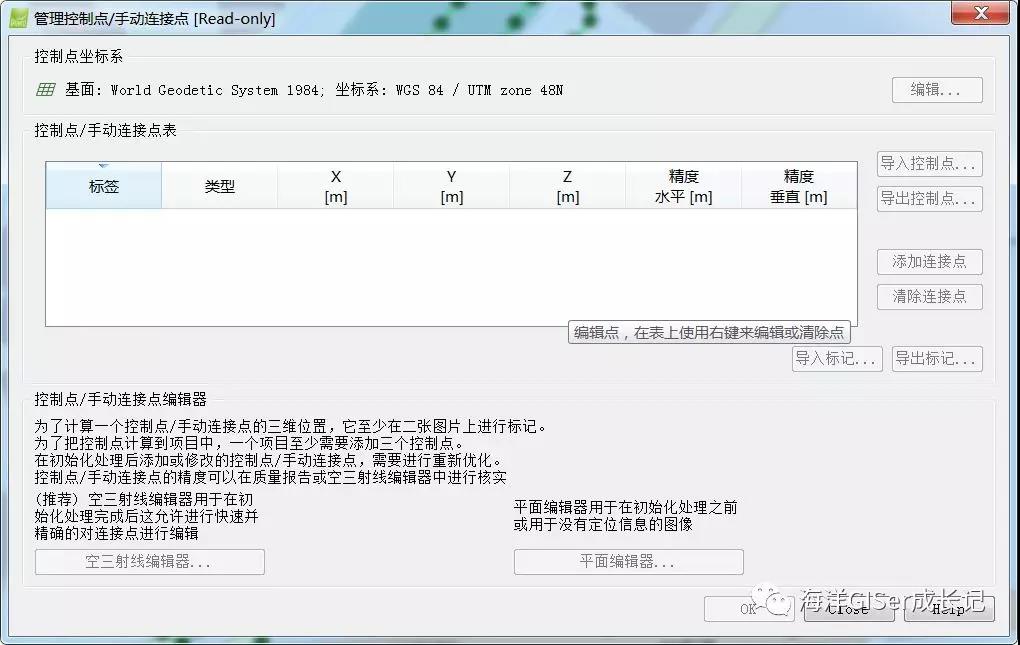
单击“项目”-“控制点/手动连接点编辑器”子菜单,添加像控点。没有像控点数据也可以不添加。
二、正射影像拼接
单击地图窗口下面“本地处理”下的“选项”按钮,弹出“处理选项”窗口,这里可以进行各选项设置,通常无需手动设置,只需要选择对应的模板。
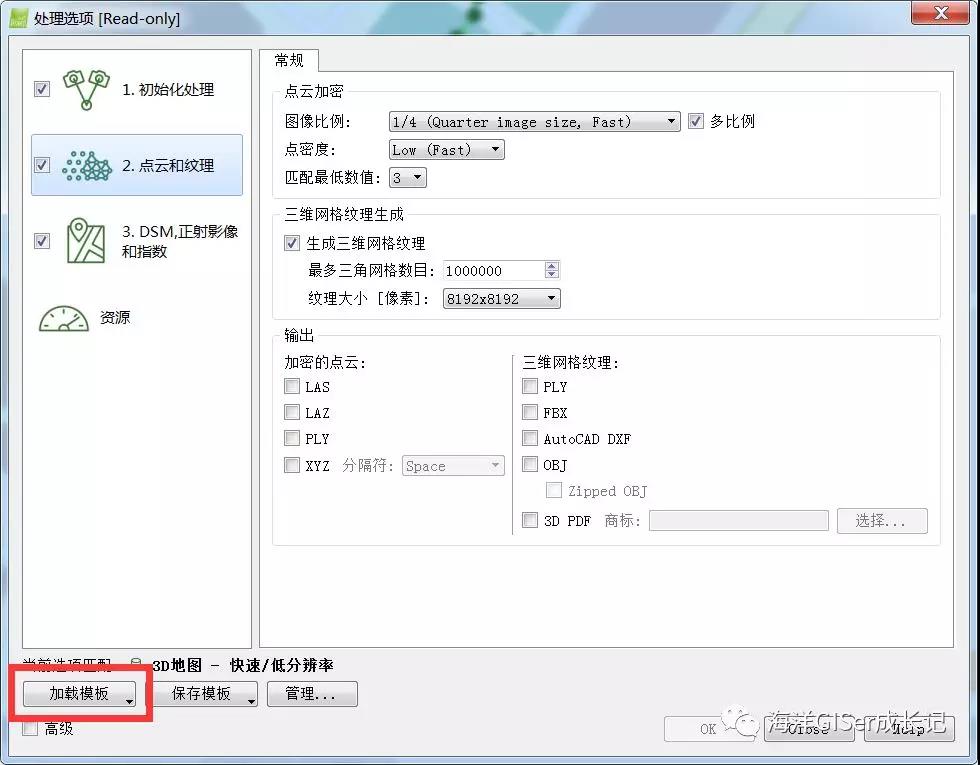
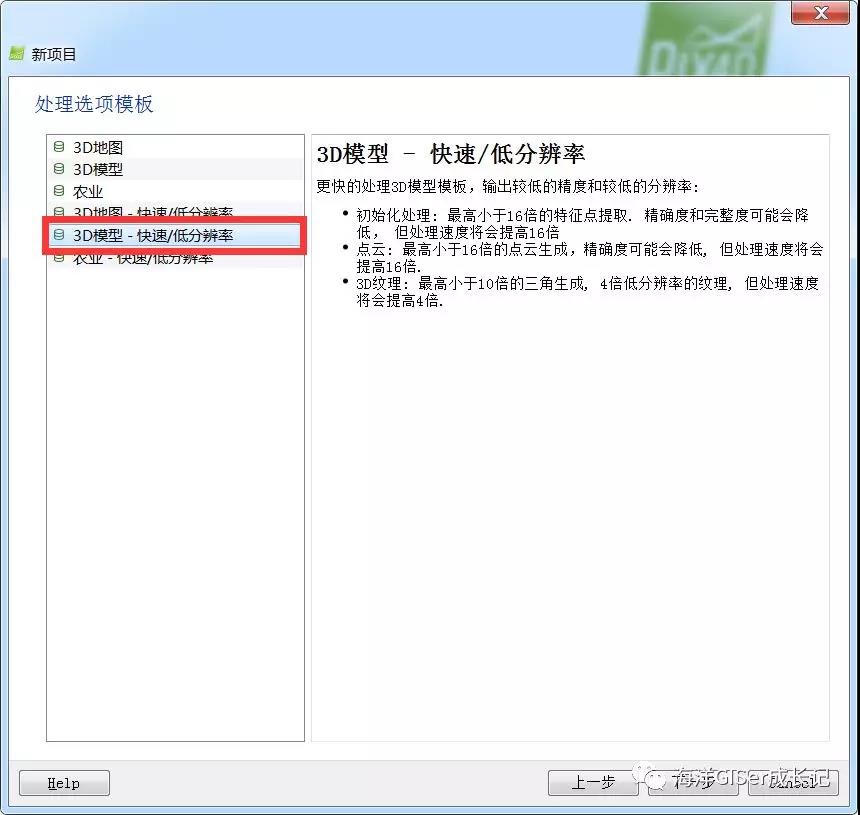
在“处理选项”对话框左下角有一个“加载模板”按钮,这里内置了各种模板对应的选项,只需选择模板即可(内置模板与新建项目中的“处理选项模板”对应)。这里选择“3D地图”或“3D地图-快速/低分辨率”模板,进入正射影像拼接功能。

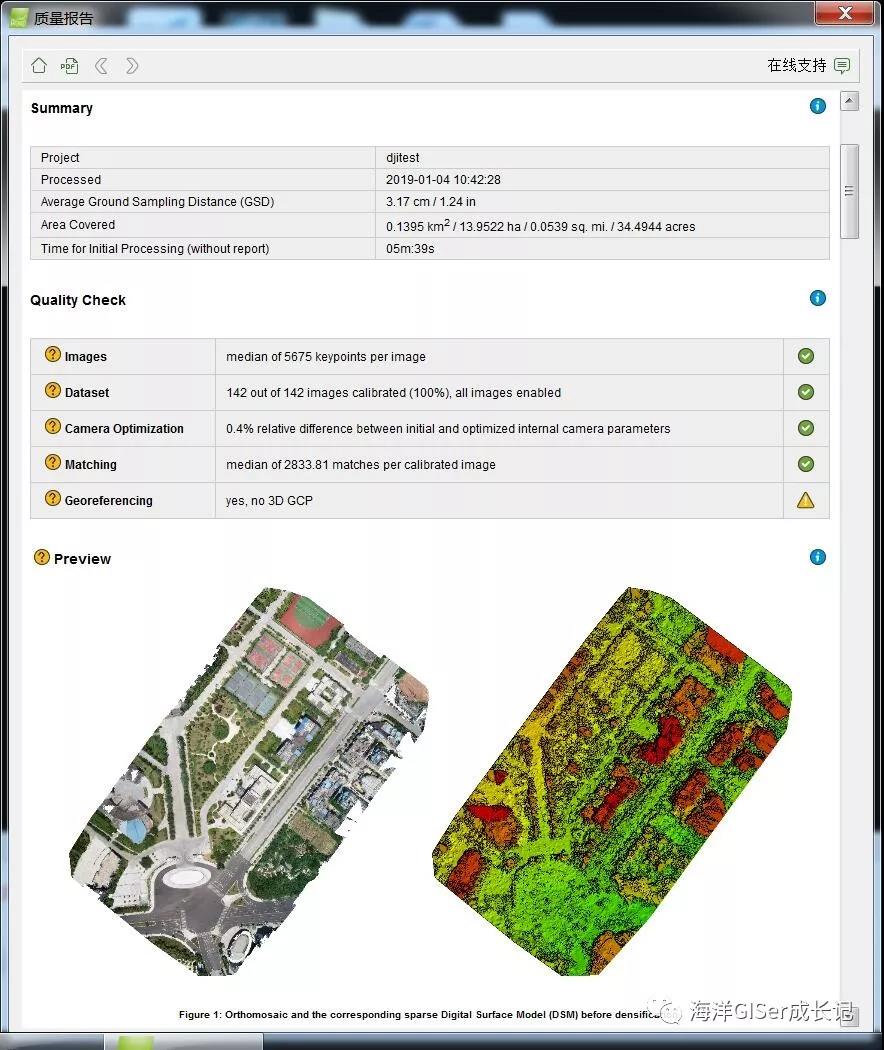
单击“开始”按钮,进入初始化处理阶段,待该阶段处理完成会弹出一个质量报告(质量报告详细介绍戳这里),同时自动进入下一步处理。
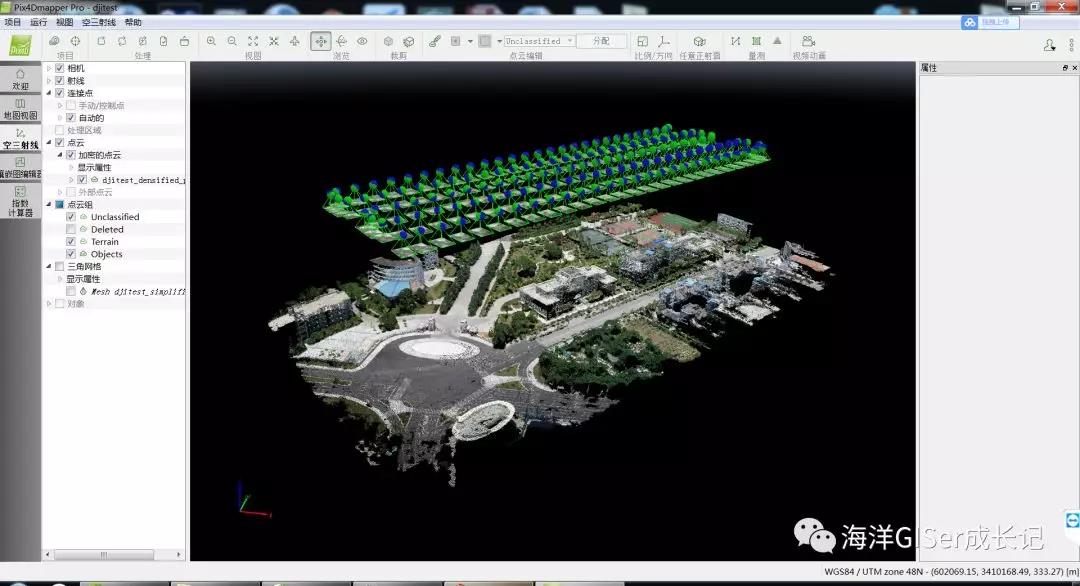
处理过程可以查看三维视图。
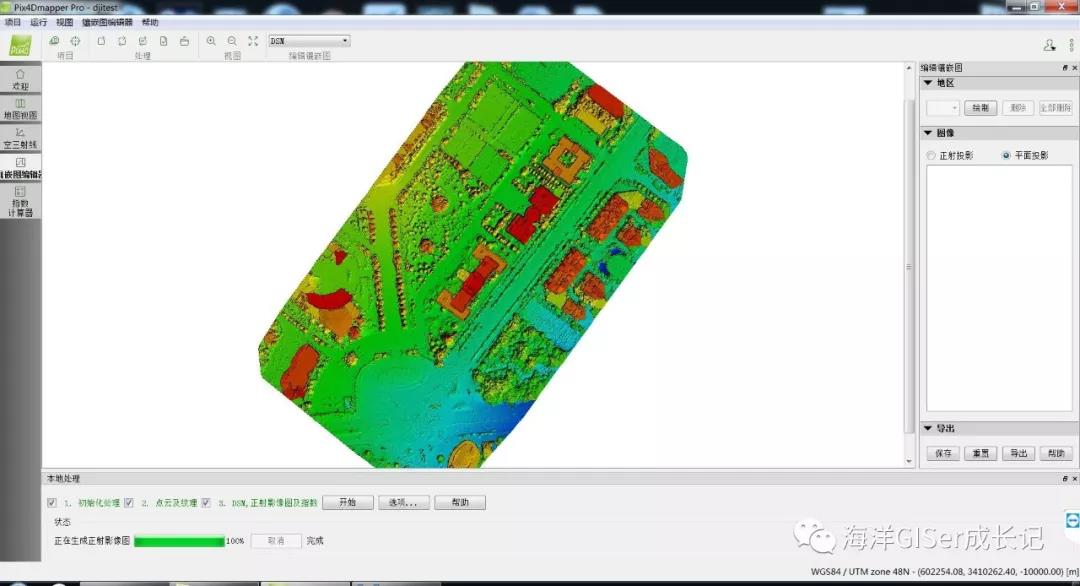
处理完成后得到数字正射影像图(DOM)。

以及数字地表模型(DSM)。
单击“运行”菜单中的“生成谷歌地图瓦片、KML和Mapbox瓦片”子菜单,可以将拼接的正射影像导出成KML格式的地图瓦片,可以加载到谷歌地球软件中查看。
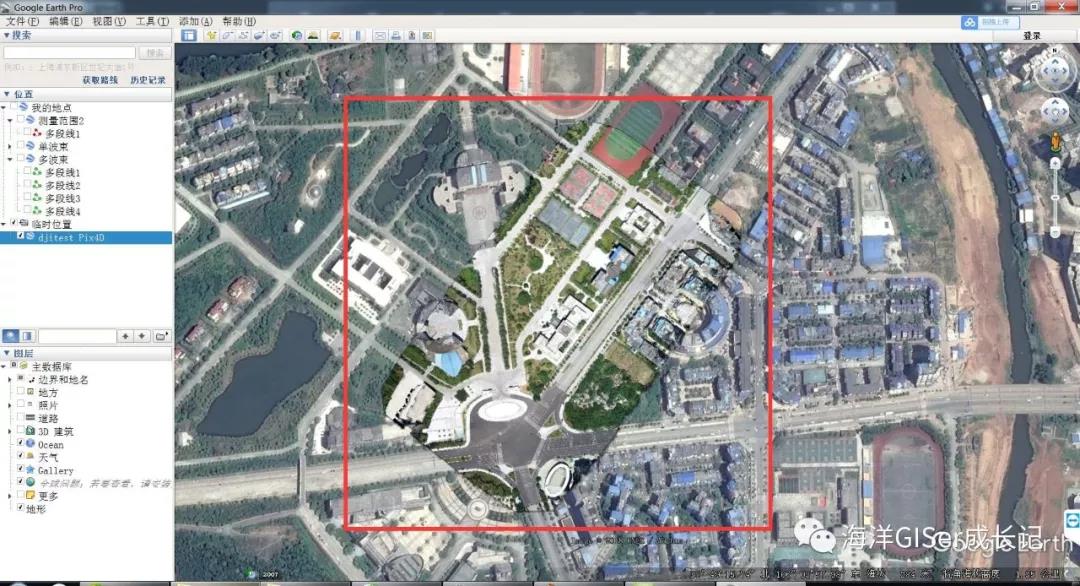
以上,正射影像拼接工作已完成。
三、倾斜三维建模
新建工程时,导入大疆无人机五个飞行航线获取的倾斜三维照片,在处理选项模板中选择“3D模型”或“3D模型-快速/低分辨率”模板,进入倾斜三维建模功能。
倾斜三维照片拍摄位置展点图。

单击地图窗口下面“本地处理”下的“开始”按钮,自动进行初始化处理和点云及纹理生成,与生成正射影像类似,初始化处理完成,弹出质量报告,并继续生成点云及纹理,待点云及纹理生成完成后,在地图窗口左侧列表中,勾选“点云”-“加密的点云”,地图窗口会显示三维点云叠加影像的三维预览图,如下图所示。
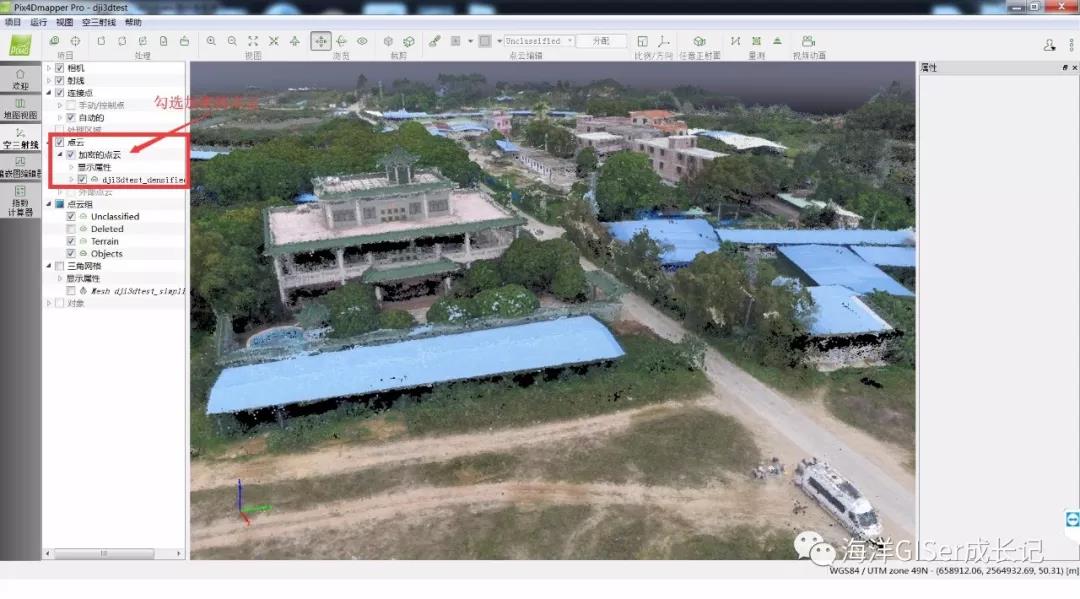
截止到目前,只生成了三维点云数据,倾斜三维模型还未生成。需要单击“运行”菜单下的“生成三维网格纹理”子菜单,待运行完成才能生成三维模型。生成的三维模型在项目路径下的“2_densification”-“3d_mesh“文件夹下,为obj格式,可以使用ContexCapture Acute3D Viewer软件、3d max 软件等通用三维软件打开。

以上,倾斜三维建模工作已完成。
四、经验小结
1、非专业应用无需添加像控点,无像控点主要是绝对位置偏差稍大;
2、处理选项模板中的“快速/低分辨率”模板是快速处理模式,处理速度快很多,但是精度会差不少;
3、相同无人机数据情况下pix4dmapper倾斜三维建模精度比Contexcapture 软件要差些,三维建模推荐使用Contexcapture 软件。
如想学习更多Pix4D技能,可参加我司与Pix4D中国区官方联合组织的Pix4D培训课程。