推荐3款倾斜摄影建模软件
作者:Davidac Lee 2019-03-18 来源:知乎专栏
使用无人机进行倾斜摄影采集航拍数据之后,需要从这些数据中提取出有用的信息或者直接进行应用,那么就需要进行建模,在此给大家介绍几款比较好用的倾斜摄影建模软件。
ContextCapture(Smart3D)
也许是最富盛名的倾斜摄影建模软件了,它原是摄影测量软件开发商 Acute3D 的主打产品,后来 Acute3D 被 Bentley 公司(没错,就是和汽车品牌宾利一个名字,但不是同一家公司)收购,更名为 ContextCapture。
Smart3D改名为ContextCapture之后,虽然不得不吐槽对于中国人而言ContextCapture这个名字大大不如Smart3D容易记住,但是换了东家,该软件的建模效果在业内的口碑仍然保持着很不错的记录。
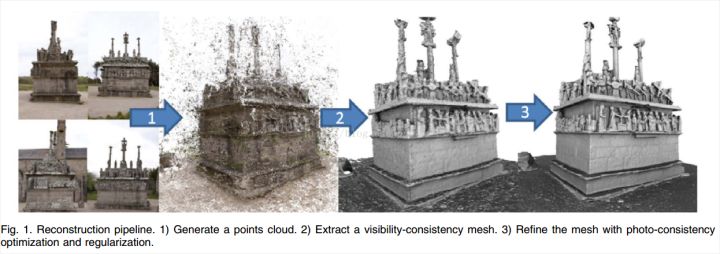
其实现原理跟传统的像方匹配或物方匹配不同,ContextCapture 是直接基于物方 mesh 进行全局优化,示意图如下:
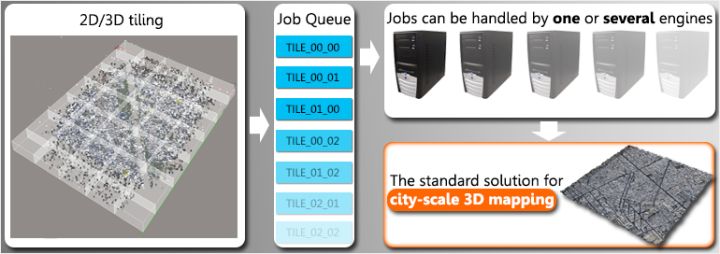
在软件使用层面,ContextCapture 具有一定的复杂性和专业性,包括主从模式、Job Queue、控制点编辑、Tiling 操作、水面约束等都知识点需要一定时间的学习才能灵活使用。
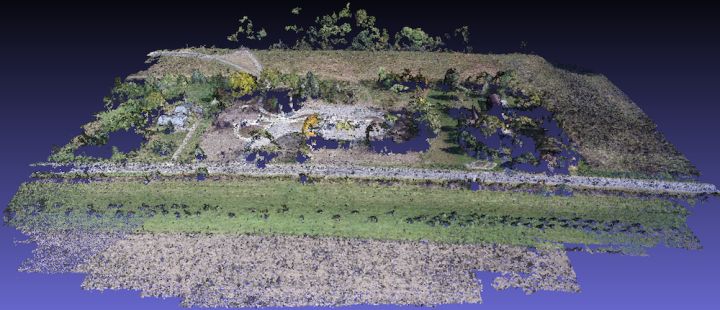
而为了确保建模的输出效果,ContextCapture 会建议你对静态建模主体进行不同的角度拍摄,并将拍摄得到的照片作为输入数据源。这些照片的最好附带着辅助数据(一般无人机默认拍摄设置都会保留),包括传感器属性(焦距、传感器尺寸、主点、镜头失真),照片的位置参数(GPS),照片姿态参数(INS),控制点等等。这样才能输出真正高分辨率的带有真实纹理的三角网格模型,这个三角格网模型能够准确精细地复原出建模主体的真实色泽、几何形态及细节构成。
Photoscan
Photoscan 是俄罗斯软件公司 AgiSoft 开发的一套基于影像自动生成三维模型的软件。
Photoscan 专业版正版价格高达 3499 美元,但由于国情原因,网络上也出现过破解版。除了用于三维建模,也有不少用户将它用在全景照片的拼接中,该软件良好的融合算法确实可以适当弥补图像重叠部分匹配准确度的不足。

在使用上,Photoscan 提供着一套近乎傻瓜式的操作流程:安装好软件并导入照片,软件会自行对齐照片,找出拍摄角度和距离,全部完成后将建立密集云,计算每一点之间的关系,将每一个识别出来的点列入密集计算中;其后生成网格,有了各个点间的矢量函数关系,再按照实际情况连接起来,构建成为点线面的 3D 模型,此时已建立出一组平面影像的 3D 外形;最后生成纹理,软件根据建立密集云时的数据,将平面影像分配给 3D 模型,此时的模型拥有内部结构和外部图像,已经形成了初步的 3D 模型。

如果把建模软件类比美图类 app,ContentCapture 对应的是 Photoshop,而 Photoscan 则更像是美图秀秀,从软件功能和界面上,Photoscan 确实轻量不少,所以在建模效果方面,Photoscan 的口碑也就参差不齐了。
OpenDroneMap
OpenDroneMap 是一个开源的航拍图像处理工具,可以把航拍图像进行点云、正射影像和高程模型等转换处理。
OpenDroneMap 最大的特点是开源和免费。开源就意味着开发者可以将 OpenDroneMap 部署到自己的电脑或者服务器上,来提供建模处理的服务。
如果只是部署 OpenDroneMap 开源库,那你会得到的是命令行的操作界面,每次操作都需要输入特定的命令行指令。不过 OpenDroneMap 也有提供 WebODM,全称为 Web OpenDroneMap,顾名思义,它就是 OpenDroneMap 的 Web 界面版本,相比于 OpenDroneMap 的命令行界面,同样的图像处理功能,WebODM 搭载在让人感到亲切的 UI 操作界面,用户体验更好了。另外,WebODM 处理后能生成多种结果,包括点云、GeoTIFF 等,可在 Web 界面做长度、面积等的测试或展示,更有利于 GIS 分析研究。
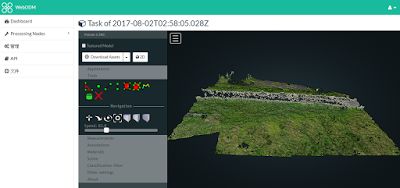
当你部署安装好 WebODM 后,接下来的操作就简单多了:创建项目 — 上传图片 — 等待处理 — 下载输出结果。
小结
今天推荐的这三款软件,尤其是前两款,使得三维重建的门槛大大降低,让非专业人士都可以成为三维模型的作者。由于图像建模算法的不同,不同的软件在最后的图像建模输出效果上也会有所差异,有条件的朋友不妨都试试。如果对建模还想进一步深入学习,不妨报名参加我司的倾斜摄影建模培训。